- Recent Changes 新聞
- History 歷史
- Preferences 喜好
 Discussion 討論
Discussion 討論
(An alternative title for this post is, what is the type of differentiation? Hint: it’s not quite (ℝ→ℝ)→(ℝ→ℝ), because how would you make sure the input function is differentiable?)
You can download this post as a literate Haskell program.
{-# LANGUAGE Rank2Types #-} {-# LANGUAGE MultiParamTypeClasses #-} {-# LANGUAGE FlexibleInstances #-} {-# LANGUAGE FunctionalDependencies #-} {-# LANGUAGE UndecidableInstances #-} {-# LANGUAGE OverlappingInstances #-} module Differentiation where
Automatic differentiation
The overloading approach to automatic differentiation has become more popular recently among typed functional programmers. The basic idea is to overload arithmetic operators such as +, ×, and sin so that they work on not just floating-point numbers but pairs (or more generally, sequences) of them, which track quantities along with their rates of change. The overloaded operators are easy to define because, unlike with integration, the rules of differentiation are compositional: you know, d(x + y) = dx + dy, d(x × y) = dx × y + x × dy, d(sin x) = cos x × dx, and so on. Here they are in Haskell.
data D a = D a a deriving Show lift :: Num a => a -> D a lift x = D x 0 infinitesimal :: Num a => D a infinitesimal = D 0 1 instance Eq a => Eq (D a) where D x _ == D y _ = x == y instance Ord a => Ord (D a) where compare (D x _) (D y _) = compare x y instance Num a => Num (D a) where D x x' + D y y' = D (x + y) (x' + y') D x x' * D y y' = D (x * y) (x' * y + x * y') negate (D x x') = D (negate x) (negate x') abs (D x x') = D (abs x) (signum x * x') signum (D x _) = lift (signum x) fromInteger x = lift (fromInteger x) instance Fractional a => Fractional (D a) where recip (D x x') = D (recip x) (-x'/x/x) fromRational x = lift (fromRational x)
The two components of a D value are a quantity and
its derivative, so the lift function ‘lifts’ a number
to a constant quantity, and infinitesimal is a
quantity with value 0 and derivative 1. Were abs
defined by abs x = signum x * x by default, we
wouldn’t have to define abs for D
above.
Let us use these definitions to model how a parabola reflects light.
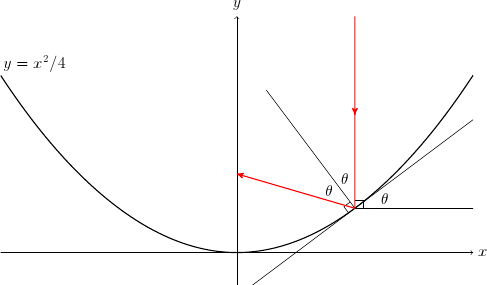
Suppose that a light ray (red above) enters a parabolic mirror y = x²/4 from above. Where does the reflected ray cross the y axis? In the diagram above, if the point where the ray hits the parabola is (x,y), then the derivative of y with respect to x is tan θ, and the y coordinate where the reflected ray crosses the y axis is y + x/tan 2θ, which is equal to y + x (1/tan θ − tan θ)/2. We can compute this coordinate by automatically differentiating y with respect to x:
curve x = x^2/4 reflect x = let D y y' = curve (lift x + infinitesimal) in y + x * (recip y' - y') / 2
As expected, the parabola reflects all incoming rays from above to the focal point (0,1).
*Differentiation> map reflect [1..5] [1.0,1.0,1.0,1.0,1.0]
To be sure, this code does not work by symbolically
differentiating y = x²/4 to yield
y′ = x/2. Rather, it computes y
alongside y′ for one particular x at a time, so
the curve could just as well be defined by a more complex program
that uses if and recursion. For example, a ray tracer
usually deals with scenes much more complex than a single parabola.
This code also does not work by numerically comparing the values of
y at nearby values of x. Instead of
approximating dy/dx by Δy/Δx where Δx is a very small real number,
we compute with an actually infinitesimal dx.
Differentiation is a higher-order function
Before we continue, let us abstract the pattern for
differentiation in reflect above into a new
higher-order function d, which differentiates any
given function at the input 0. For convenience, d
also returns the value of the given function at 0.
d :: Num a => (D a -> D b) -> (b, b) d f = let D y y' = f infinitesimal in (y,y') reflect :: Fractional a => a -> a reflect x = let (y,y') = d (\h -> curve (lift x + h)) in y + x * (recip y' - y') / 2
Even though the reflect function uses
differentiation internally, we can still differentiate it. Such
differentiate is said to be nested. For the parabola, we
can confirm that the reflected ray hits the focal point not just at
but also around x = 3, because the derivative
computed below is zero.
*Differentiation> d (\k -> reflect (3 + k)) (1.0,0.0)
For other curves and surfaces, the derivative is typically not zero and tells us the density of light energy that falls around each point on the y axis. Hence, as Dan Piponi noted, this kind of calculation is performed by ray tracers and other programs that sample from probability distributions.
Another application of automatic differentiation is to find roots of a function using Newton’s method. Therefore, we can use nested automatic differentiation to find local extrema and saddle points of a function using Newton’s method.
The danger of confusing infinitesimals
Jeff Siskind
and Barak Pearlmutter pointed out a kind of programmer mistake that
makes nested differentiation give the wrong result. As they
show, this kind of mistake is easy to make in the framework defined
above, because all it takes is putting a call to the
lift function in the wrong place. The definition of
reflectBug below is only slightly different from
reflect, but the result is very different and very
wrong.
reflectBug x = let (y,y') = d (\h -> lift (curve (x + h))) in y + x * (recip y' - y') / 2 *Differentiation> d (\k -> reflectBug (3 + k)) (Infinity,NaN)
They demonstrate this problem using running code in Haskell and Scheme that computes
to be 2 rather than the correct answer 1.
The essence of this problem is that the two nested invocations of differentiation use two different infinitesimals, which a mathematician would denote by dh and dk. These two infinitesimals should not be confused, just as years and feet and persons should not be confused.

Using types to check units
Björn
Buckwalter showed that we can use a generic type system to prevent
such confusion statically, just as Haskell uses state
threads to distinguish pointers into different memory
regions. Recall that the type ST s a in Haskell
represents a monadic computation that yields a result of
type a using mutable cells in the state thread
represented by the phantom type s. To construct
such a computation, we can use primitive operations such as
newSTRef :: a -> ST s (STRef s a)
and the fact that ST s is a monad. To run such a
computation, we must use the primitive function
runST :: (forall s. ST s a) -> a
in which forall s forces different state threads,
created by different calls to runST, to be represented
by different phantom types s. One way to
understand this rank-2 type is that it makes the type checker
generate a new phantom type s for each argument
to runST. Analogously, Buckwalter redefines the type
constructor D to take a phantom-type
argument s, which represents an infinitesimal
unit.
data D s a = D a a deriving Show
Accordingly, the other definitions above change in their types,
but not in their terms or behavior. The most important change is
the new rank-2 type of d, which forces different
infinitesimals, created by different invocations of
differentiation, to be represented by different phantom
types s.
d :: Num a => (forall s. D s a -> D s a) -> (a, a) d f = let D y y' = f infinitesimal in (y,y') lift :: Num a => a -> D s a lift x = D x 0 infinitesimal :: Num a => D s a infinitesimal = D 0 1 instance Eq a => Eq (D s a) where D x _ == D y _ = x == y instance Ord a => Ord (D s a) where compare (D x _) (D y _) = compare x y instance Num a => Num (D s a) where D x x' + D y y' = D (x + y) (x' + y') D x x' * D y y' = D (x * y) (x' * y + x * y') negate (D x x') = D (negate x) (negate x') abs (D x x') = D (abs x) (signum x * x') signum (D x _) = lift (signum x) fromInteger x = lift (fromInteger x) instance Fractional a => Fractional (D s a) where recip (D x x') = D (recip x) (-x'/x/x) fromRational x = lift (fromRational x)
Because the phantom type s is part of the type
of a number, and because arithmetic operations such as
+ require the arguments and the return value to have
the same type, it is a type error to add numbers denominated in
different infinitesimals. In particular, the erroneous definition
reflectBug above is now a type error, as desired.
Occurs check: cannot construct the infinite type: t = D s t Expected type: t Inferred type: D s t In the first argument of `lift', namely `(curve (x + h))' In the expression: lift (curve (x + h))
For this checking of infinitesimal units to be sound, this
library for automatic differentiation should not export the values
D and infinitesimal to its users, though
of course the type constructor D and its type-class
instances need to be exported, along with the functions
d and lift.
d :: Num a => (forall b. Num b => (a -> b) -> b -> b) -> (a, a)
for differentiation. The type b makes it
unnecessary and useless to export the type
constructor D, even though d is
still implemented using D. Also, the new argument
of type a -> b
makes it unnecessary and useless to export the lift
function. Finally, the type-class context Num b makes
it unnecessary and useless to export the Eq,
Show, and Num instances
for D.
However, as Chris Smith lamented, we need additional
differentiation functions of the types
Fractional a => (forall b. Fractional b => (a -> b) -> b -> b) -> (a, a) Floating a => (forall b. Floating b => (a -> b) -> b -> b) -> (a, a)
in order to differentiate functions that use
Fractional or Floating operations.
Oleg
Kiselyov used similar types to express symbolic
differentiation.)
Automatic lifting
Although the type system now prevents us from putting calls to
lift in the wrong place, it is still annoying to have
to invoke lift manually—especially for nested
differentiation, a useful case as discussed above. Depending on
‘how constant’ a quantity is, we need to feed it through a
composition of exactly the right number of lifts. This
manual coding is frustrating because the unique right number of
lifts to apply is obvious from the input and output
types desired: to convert a type a to the type
D s a, apply lift once; to convert
a to D s (D s' a), apply
lift twice; and so on. We want the compiler to manage
these subtyping coercions automatically.
An analogous situation arises with state threads, which can be
organized into a hierarchy of memory regions. As
part of a monadic computation that uses mutable cells in a
parent region, we can create a child region and
perform a subcomputation that allocates and accesses mutable cells
in both regions. After the subcomputation completes, the
child region is destroyed en bloc, but we can still use the parent
region and observe any effect on it brought about by the
subcomputation. To allow the subcomputation to use the parent
region, we want every region to be a subtype of its
descendents. Matthew Fluet
and Greg Morrisett’s implementation of nested regions in Haskell
uses explicit subtyping coercions just like our
lift: depending on ‘how senior’ a region is, we need
to compose exactly the right number of region coercions.
In a
pending submission to the Haskell symposium, Oleg and I show how to
automate region subtyping coercions using type classes. One
might hope to apply that approach to lifting in automatic
differentiation. Indeed we can, but I only know how to automate
counting lifts, not how to automate placing them. That
is, instead of feeding each use of an input quantity to the
lift function exactly the right number of times, we
can feed it to a new function once. The new function, called
lifts, belongs to a new type class Lifts,
which takes two type parameters. The constraint Lifts a
b holds if and only if the type b is the
result of applying zero or more type constructors D s
to the type a.
class Lifts a b where lifts :: a -> b
More concretely, the following instances incompletely
approximate the intended meaning of Lifts.
instance Lifts a a where lifts = id instance Num a => Lifts a (D s a) where lifts = lift instance Num a => Lifts a (D s (D s' a)) where lifts = lift . lift instance Num a => Lifts a (D s (D s' (D s'' a))) where lifts = lift . lift . lift
The definition above of reflect in terms
of d applies lift once to one
occurrence of x but not to other occurrences of
x and h. The same function can be
expressed using Lifts, by applying lifts
once to each occurrences of the input variables x
and h.
reflectAuto :: Fractional a => a -> a reflectAuto x = let (y,y') = d (\h -> curve (lifts x + lifts h)) in y + lifts x * (recip y' - y') / 2
Expressing reflect in this new way frees us from
counting how many times to lift the inputs
x and h each time they are used.
How to implement Lifts? On one hand, as an
implementation of Lifts, the approximate instances
above are incomplete and unsatisfactory in theory, in that they
restrict how many lift each lifts can
stand for. They are perfectly useful in practice, however, and rely
on no extension to Haskell other than rank-2 types and
multiparameter type classes with flexible instances. On the other
hand, a complete implementation is possible using the
TypeCast class for type improvement (originally used by Kiselyov,
Lämmel, and Schupke to implement heterogeneous collections),
but it requires more Haskell extensions: functional dependencies,
overlapping instances, and undecidable instances. Without further
ado, below is the complete implementation.
instance Lifts a a where lifts a = a instance (TypeCast (D s b') b, Num b', Lifts a b') => Lifts a b where lifts = typeCast . lift . lifts class TypeCast a b | a -> b, b -> a where typeCast :: a -> b class TypeCast' t a b | t a -> b, t b -> a where typeCast' :: t -> a -> b class TypeCast'' t a b | t a -> b, t b -> a where typeCast'' :: t -> a -> b instance TypeCast' () a b => TypeCast a b where typeCast x = typeCast' () x instance TypeCast'' t a b => TypeCast' t a b where typeCast' = typeCast'' instance TypeCast'' () a a where typeCast'' _ x = x
Although Lifts makes it easier to use automatic
differentiation, this implementation is heavy lifting. I wonder if
it is easier to express this combination of subtyping and rank-2
polymorphism in a language like Scala?